New camera from ZWO
I pre-ordered the ZWO ASI715MC planetary camera back in October and it arrived yesterday. The ASI715 has the very small (5.6x3.2mm) Sony IMX715 color sensor with 1.45 micron pixels, low read noise, and an interesting QE curve that's sensitive across the visible bandpasses through the hydrogen-alpha line and into the near infra-red, with RGB QE coming together in the high 80s for the methane line and other NIR bands. It's 8.26 MP / 4k resolution. This looks like a fun camera. Can't wait for some clear skies.

Sony IMX715 sensor Quantum Efficiency curve:

Posted December 10, 2023
Narrowband filter set complete
I already have a 2 inch 3-nanometer Hydrogren-alpha (Ha) filter, and today UPS dropped off the other two, Sulfur 2 (SII) and Oxygen 3 (OIII) filters, both 3nm narrowband. It's almost as if my birthday is a week away. (A little more than a week, actually).

Posted August 23, 2023
New Camera - ZWO ASI2600MM-Pro monochrome
It's a big jump from the ASI1600MM-Pro, going from a 4/3s size sensor to an APC-C at 26MP, which requires larger LRGB and narrowband filters. They're a bit pricier, but I have decided to go all the way to 2" mounted filters (or 50.4mm unmounted), anticipating a future jump to a full frame monochrome astro camera.

Posted June 29, 2023
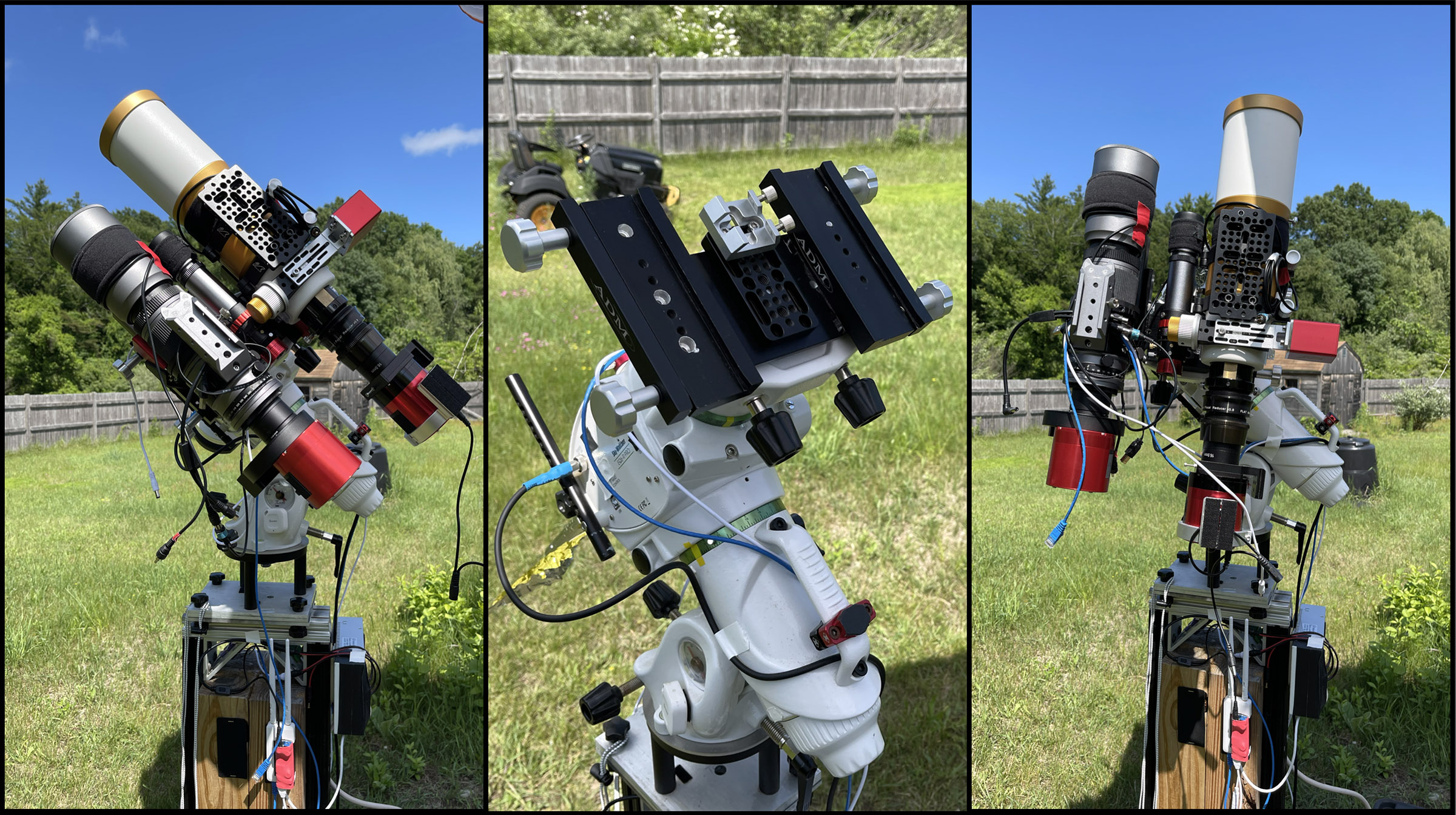
Dual refractors
Setting up two refractors, the William Optics GT81 (right) and William Optics SpaceCat 51 (left). I'm running monochrome with 3nm filters on the SpaceCat and RGB color on the GT81. It's beautiful out there now, but into the evening the forecast is calling for a solid cloud cover. I'll be ready if there's a decent break in the clouds!
Posted June 19, 2023
Astro setup last week
Well, we had a good run of clear night skies last week, and here we are heading toward the new moon, and it's going to rain for three or four days. Anyway, it was great while it lasted. Taking very long exposure images with a telescope, and by long exposure I'm talking the shutter open 5 minutes for each frame. Every image I captured over the last five clear nights has been through this 8 inch Newtonian scope (8 inch primary mirror (203mm) inside the tube where the gold foil cap covers the end, the secondary mirror is where the camera connects to the focuser, toward the top of the scope). And I ran every night's imaging session with the ZWO ASIAir controller.

Posted October 24, 2022
ASIAir Plus with the Sky-Watcher
Trying something new tonight. So far, I've only used the ZWO ASIAir Plus with the AM5 mount and my William Optics scopes. So, I'm setting up the Sky-Watcher EQ6R-Pro and the 800mm Newtonian for narrowband, and decided to try out the ASIAir with this combination of gear. It has every feature I use with NINA (my normal astro controller system), that's polar alignment, plate solving, sequenced capture, guiding, so should work well!

Posted October 16, 2022
Testing, Testing, 1, 2, 3...
I'm hoping for some clear skies tonight, enough to test out the #ZWOAM5 with my trusty William Optics GT81 and the ZWO ASI071 cooled color camera. It's a beautiful fall day out there right now, at quarter after 5pm, but I don't think this is going to last into the evening.

Posted September 7, 2022
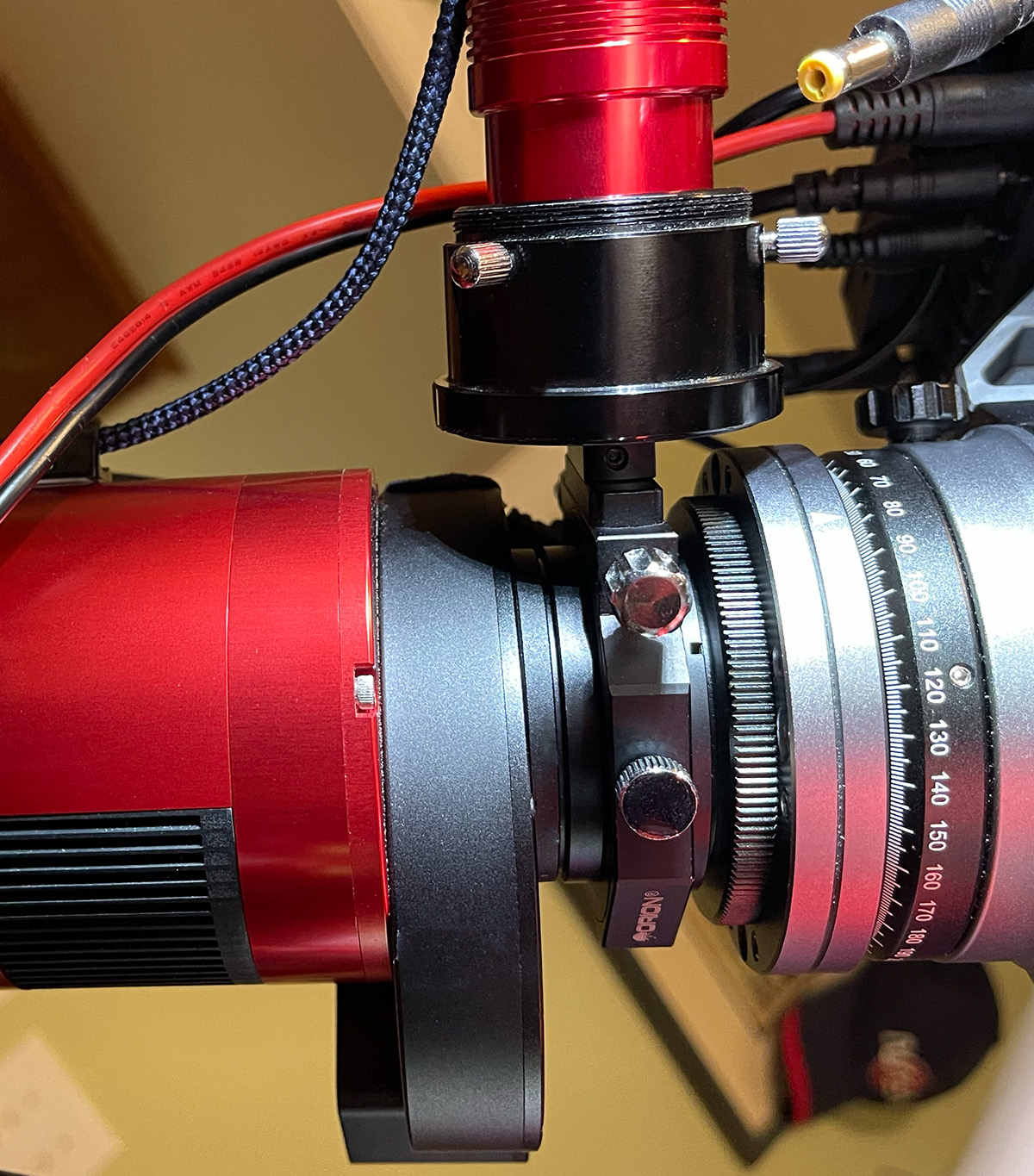
Configuring an Off-axis Guider with the SpaceCat
Just wanted to document the spacing and backfocus distance for the ZWO ASI1600MM-Pro with the electronic filter wheel and OAG. The William Optics SpaceCat 51 allows a maximum distance of 57.9mm to achieve minimum focus, so I like to be somewhere close to 50mm when everything is totaled up--and looking good:
- ASI1600MM 6.5mm
- ZWO EFW 20mm
- M42-M48 ~5mm
- M48 spacer 5mm
- OAG 10.5mm
- 42-M48 ~3mm
Total: ~50mm